Для систем дискретного автоматического управления объектами с конечным количеством состояний, у которых алгоритм перехода из одного состояния в другое определяется значениями параметров объекта и не имеет жёсткой последовательности, могут применяться алгоритмы цифровых автоматов, например, цифрового автомата Мура.
Блок-схема автомата Мура приведена на рис. 5.3.
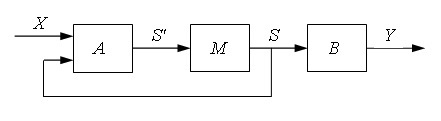
Рис. 5.3. Блок-схема автомата Мура
На рис. 5.3 приведены следующие обозначения:
— Х – вектор входа;
— А – функция перехода;
— Sʹ – вектор нового состояния;
— М – память;
— S – вектор текущего состояния;
— В – функция выхода;
— Y – вектор выхода.
Вектор входа Х соответствует совокупности состояния текущих параметров объекта управления, влияния на объект возмущающих воздействий, а также внешних сигналов управления
Вектор выхода Y определяет совокупность сигналов управления, поступающих на исполнительные устройства.
Векторы текущего S и нового Sʹ состояний характеризуют режимы работы объекта и его отдельных частей.