Агрегатный способ построения состоит в том, что система управления представляется в виде совокупности взаимодействующих стандартных комбинационных и последовательностных устройств пневмогидроавтоматики. Такой подход существенно упрощает проектирование систем управления, хотя и связан с некоторой элементной избыточностью по сравнению с элементным методом.
Сущность агрегатного метода построения системы управления на элементах пневмогидроавтоматики заключается в следующем:
- каждый такт выполняется стандартным цифровым блоком, состоящим из входного логического элемента И-НЕ и RS-триггера (на рис. 9.6 обведён штриховой линией);
- на каждый усилитель имеется свой управляющий RS-триггер;
- работа системы в последующем такте подготавливается сигналом о выполнении предыдущего такта;
- включение последующего такта запрещает работу системы управления в предыдущем такте;
- последний блок системы управления является предыдущим для первого блока.
Составим схему пневмогидравлической системы управления, реализующей цикл А+ (зажим); В+ (быстрый подвод); В++ (рабочая подача); В– (отвод) и А– (разжим).
Система управления состоит из двух двигателей – цилиндров А и В, выполняющих заданную последовательность работы. В качестве датчиков положения для контроля местонахождения конца штоков (а1, а2, b1, b2, b3) используются элементы «кольцевое сопло́ – заслонка». Они выдают сигналы противо-положные сигналам датчика с прерыванием струи. Выходной сигнал датчика «кольцевое сопло́ – заслонка» имеет значение «1» при нахождении конца штока в зоне действия этого датчика.
Запуск и останов системы производится кратковременными воздействиями на нормально-закрытые кнопки “Пуск”(Кп) и “Стоп” (Кс).
Составим таблицу состояний входных и выходных устройств (табл. 9.3).
Таблица 9.3
Таблица состояний входных и выходных устройств

Первый такт: (А+) (строка 1).
Для реализации первого такта должны выполниться следующие условия: штоки цилиндров А и В находятся в исходном положении (втянуты), концы штоков находятся в зоне действия датчиков положения а1 и b1. Поскольку в качестве датчиков используются элементы «сопло – заслонка», то сигналы, поступающие от них (при попадании в их зону действия конца штока) в систему управления имеют значение «1» (а1= 1, b1= 1). Сигналы нулевого уровня от датчиков положения нас не интересуют, поэтому в таблицу их не записываем.
При нажатии на кнопку «Пуск» от неё в систему управления поступает сигнал «1» (Кп =1). Чтобы при отпускании кнопки «Пуск» работа гидропривода не остановилась, необходимо запомнить, что кнопка «Пуск» была нажата. Это должно выдерживаться в течение всего цикла работы. Для этого в столбец «Память Кп» записываем 1 для всех тактов.
На усилитель УС1 от контролера поступает сигнал «1» (УС1=1) и шток цилиндра А выдвигается с быстрой скоростью. Реализуется операция А+.
(Эти условия внесём в первую строку таблицы состояний).
Второй такт: (В+) (строка 2).
При достижении концом штока цилиндра А датчика положения а2 от него в систему управления поступает сигнал «1» (а2= 1). Конец штока цилиндра В по-прежнему находится возле датчика b1 (b1=1). При этом сигнал единичного уровня должен поступить на усилитель УС2 (УС2=1). Шток цилиндра В выдвинется с быстрой скоростью и его конец попадёт в зону действия датчика положения b2. Реализуется операция В+. (Эти условия надо внести во вторую строку таблицы состояний).
Третий такт: (В++).
При достижении концом штока цилиндра В датчика положения b2 от него в систему управления поступает сигнал «1» (b2= 1). Конец штока цилиндра A должен по-прежнему находиться возле датчика а2 (а2=1). При этом на усилителях УС1 и УС2 сигнал единичного уровня сохраняется (УС1=1,УС2=1). На усилителе УС3 должен появиться сигнал единичного уровня (УС3=1). Шток цилиндра В должен продолжать выдвигаться с медленной скоростью и его конец попадёт в зону действия датчика положения b3. Реализуется операция В++. (Эти условия надо внести в третью строку таблицы состояний).
Четвёртый такт: (В–).
При достижении концом штока цилиндра В датчика положения b3 от него в систему управления поступает сигнал «1» (b3= 1). Конец штока цилиндра A по-прежнему находится возле датчика а2 (а2=1). При этом на усилителе УС1 сигнал единичного уровня сохраняется (УС1=1), а на усилителях УС2 и УС3 должны появиться сигналы нулевого уровня (УС2=0, УС3=0). Шток цилиндра В должен втянуться с быстрой скоростью и его конец попадёт в зону действия датчика положения b1. Реализуется операция В–. (Эти условия надо внести в четвёртую строку таблицы состояний).
Пятый такт: (А–).
При достижении концом штока цилиндра В датчика положения b1 от него в систему управления поступает сигнал «1» (b1= 1). Конец штока цилиндра A по-прежнему находится возле датчика а2 (а2=1). При этом на усилителе УС1 должен появиться сигнал нулевого уровня (УС1=0). Шток цилиндра А должен втянуться и его конец попадёт в зону действия датчика положения а1. Реализуется операция А–. (Эти условия надо внести в пятую строку таблицы состояний).
Операция «Стоп».
Для того чтобы прервать работу гидропривода (при любом положении штоков цилиндров) необходимо нажать на кнопку «Стоп», от которой в контроллер пойдёт сигнал «1» (Кс =1). При этом управляющие сигналы на всех усилителях должны принять нулевое значение (УС1=0, УС2=0, УС3=0). Штоки цилиндров А и В вернутся в исходное положение (втянутся) с быстрой скоростью и гидропривод остановится. Реализуется операция «Стоп». (Эти условия надо внести в пятую строку таблицы состояний).
На основании таблицы состояний входных и выходных устройств составляется принципиальная схема пневматической струйной системы управления циклом А+;В+;В++;В–;А– (рис. 9.6).
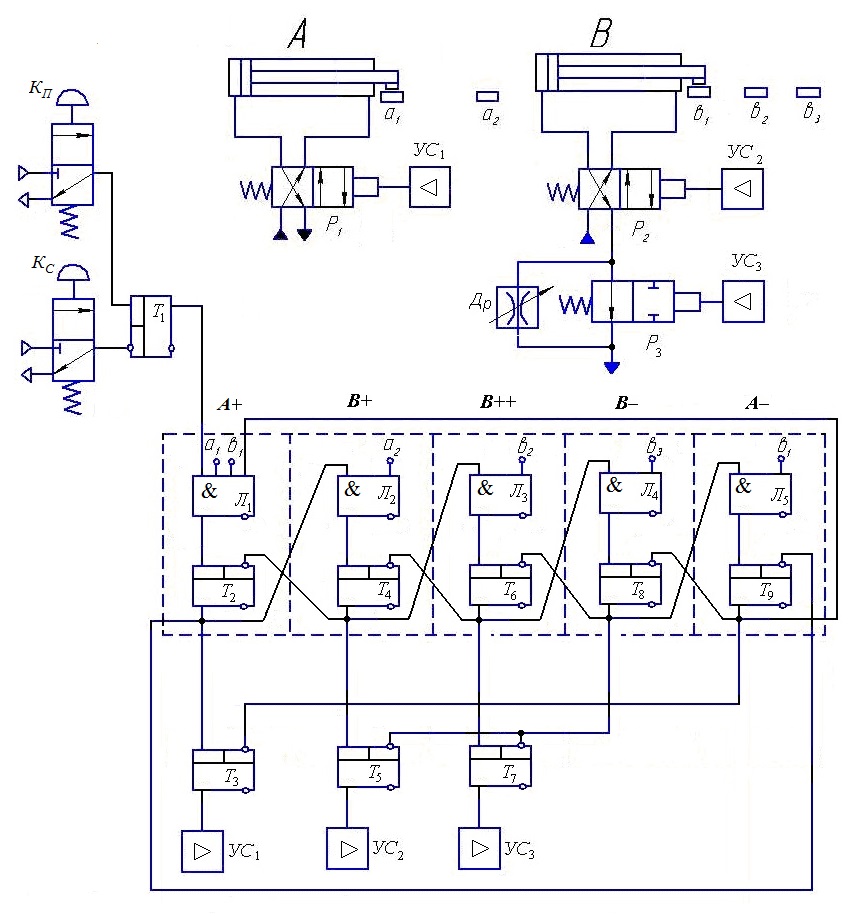
Описание работы системы управления циклом А+;В+;В++;В–;А–.
В исходном положении штоки цилиндров втянуты, и сигналы от датчиков положения а1, b1 имеют значение «1», Эти сигналы единичного уровня поступают на входы логического элемента Л1. Также на вход этого элемента поступает сигнал «1» от триггера Т9, который разрешает работу первого такта.
При нажатии на кнопку «Пуск» (Кп) на прямой вход триггера Т1 подается сигнал «1», триггер переключается и на его прямом выходе появляется сигнал «1», Который поступает на вход логического элемента Л1. Так как на всех четырёх входах этого элемента И-НЕ присутствуют сигналы «1», то на его прямом выходе формируется сигнал «1», который поступает на прямой вход RS-триггера Т2. На прямом выходе триггера Т2 появляется сигнал «1». Этот единичный сигнал поступает на прямой вход триггера Т3, на прямом выходе которого формируется сигнал «1», включающий усилитель УС1. В усилителе УС1 этот сигнал усиливается до значения 0,2 – 0,3 МПа и включает распределитель Р1 (золотник распределителя смещается по схеме влево), при этом масло от насоса попадает в поршневую полость цилиндра А, и его шток выдвигается. Также сигнал «1» с выхода триггера Т2 поступает на вход логического элемента Л2, подготавливая работу второго такта. Кроме того сигнал «1» с выхода триггера Т2 поступает на инверсный вход триггера Т9, тем самым запрещая работу предыдущего пятого такта.
Когда шток цилиндра А дойдёт до путевого выключателя а2, сигнал «1» с него поступит на логический элемент Л2 (И-НЕ) и начнётся работа второго такта. Сигнал «1» с элемента Л2 переключает триггер Т4, сигнал «1» с прямого выхода которого поступает на инверсный вход триггера Т2, запрещая работу первого такта; также этот сигнал поступает на вход логического элемента Л3, подготавливая работу третьего такта. Также этим сигналом переключается триггер Т5 и включается усилитель УС2. Усилитель УС2 переключает распределитель Р2 (по схеме сдвигая его влево), при этом масло от насоса попадает в поршневую полость гидроцилиндра В и его шток выдвигается с быстрой скоростью.
Когда шток цилиндра В дойдёт до путевого выключателя b2, сигнал «1» с него поступит на логический элемент Л3 (И-НЕ) и начнётся работа третьего такта. Включается усилитель УС3 и перемещает золотник распределителя Р3 по схеме влево. Масло, вытекая из штоковой полости гидроцилиндра В проходит через дроссель (проходное сечение которого меньше, чем сечение основного трубопровода) и шток цилиндра В выдвигается дальше с медленной скоростью.
Когда шток цилиндра В дойдёт до путевого выключателя b3, сигнал «1» с него поступит на логический элемент Л4 и начнётся работа четвёртого такта. На четвёртом такте сигнал «1» с триггера Т8 поступая на инверсные входы триггеров Т5 и Т7, отключает усилители УС2 и УС3. Гидрораспределители Р2 и Р3 под действием пружин возвращаются в исходные положения, масло от насоса поступает в штоковую полость гидроцилиндра В, шток втягивается с быстрой скоростью и масло из поршневой полости гидроцилиндра В через распределитель Р3 сливается в гидробак.
Когда шток цилиндра В дойдёт до путевого выключателя b1, сигнал «1» с него поступит на логический элемент Л5 и начнётся работа пятого такта. На пятом такте отключается усилитель УС1, распределитель Р1 под действием пружины возвращается в исходное положение, масло от насоса поступает в штоковую полость цилиндра А и его шток втягивается с быстрой скоростью. При этом масло из поршневой полости сливается в гидробак.
Далее цикл работы повторяется.
Для останова гидропривода нажимается кнопка «Стоп» (КС) с неё сигнал «1» поступает на инверсный вход триггера Т1, на прямом выходе которого формируется сигнал «0», поступающий на вход логического элемента Л1 (И-НЕ). На выходе этого элемента формируется сигнал «0» и работа схемы прекращается.
Пневмогидравлическая система управления технологическим оборудованием