Рассмотрим реализацию пневматической или гидравлической системой управления цикла А+; В+; В–; А–. Привод (рис. 9.4) содержит два двигателя – цилиндры А и В, которые должны выполнять заданную последовательность движений А+; В+; В–; А–.
Положение рабочих органов контролируется датчиками положения с прерыванием струи а1, а2, b1 и b2.
Пуск и останов системы производится нормально-закрытыми кнопками «Пуск» (Кп) и «Стоп» (Кс).
Управление цилиндрами осуществляется двухпозиционными распределителями P1 и Р2 с пружинным возвратом, переключение которых обеспечивается усилителями давления УС1 и УС2.
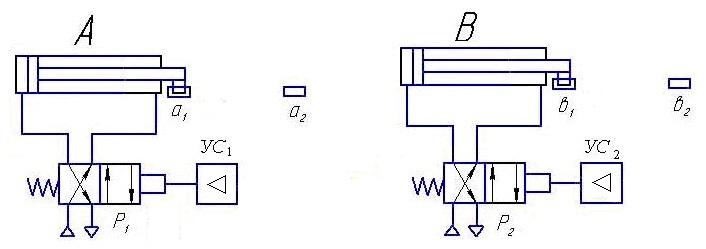
Рис. 9.4. Принципиальная схема привода для реализации цикла А+; В+; В–; А–.
Составляем таблицу состояний входных и выходных устройств (табл. 9.2). Для этого в таблицу заносим значения сигналов следующим образом.
Таблица 9.2
Состояния входных и выходных устройств
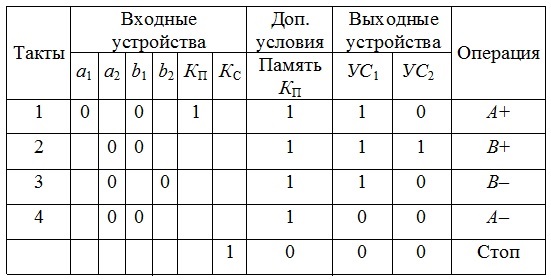
Первый такт: (А+) (строка 1).
Для реализации первого такта должны выполниться следующие условия: штоки цилиндров А и В находятся в исходном положении (втянуты), концы штоков находятся в зоне действия датчиков положения а1 и b1. Поскольку используются датчики с прерыванием струи, то сигналы, поступающие от них (при попадании в их зону действия конца штока) в систему управления имеют значение «0» (а1= 0, b1= 0). 1). Сигналы единичного уровня от датчиков положения нас не интересуют, поэтому в таблицу их не записываем.
При нажатии на кнопку «Пуск» от неё в систему управления поступает сигнал «1» (Кп =1). Чтобы при отпускании кнопки «Пуск» работа гидропривода не остановилась, необходимо запомнить, что кнопка «Пуск» была нажата. Это должно выдерживаться в течение всего цикла работы. Для этого в столбец «Память Кп» записываем 1 для всех тактов.
На усилитель УС1 от контролера поступает сигнал «1» (УС1=1) и шток цилиндра А выдвигается. Реализуется операция А+.
(Эти условия внесём в первую строку таблицы состояний).
Второй такт: (В+) (строка 2).
При достижении концом штока цилиндра А датчика положения а2 от него в систему управления поступает сигнал «0» (а2= 0). Конец штока цилиндра В по-прежнему находится возле датчика b1 (b1=0). При этом сигнал единичного уровня должен поступить на усилитель УС2 (УС2=1). Шток цилиндра В выдвинется и его конец попадёт в зону действия датчика положения b2. Реализуется операция В+. (Эти условия надо внести во вторую строку таблицы состояний).
Третий такт: (В–).
При достижении концом штока цилиндра В датчика положения b2 от него в систему управления поступает сигнал «0» (b2= 0). Конец штока цилиндра A по-прежнему находится возле датчика а2 (а2=0). При этом на усилителе УС2 должен появиться сигнал нулевого уровня (УС2=0). Шток цилиндра В должен втянуться и его конец попадёт в зону действия датчика положения b1. Реализуется операция В–. (Эти условия надо внести в третью строку таблицы состояний).
Четвёртый такт: (А–).
При достижении концом штока цилиндра В датчика положения b1 от него в систему управления поступает сигнал «0» (b1= 0). Конец штока цилиндра A по-прежнему находится возле датчика а2 (а2=0). При этом на усилителе УС1 должен появиться сигнал нулевого уровня (УС1=0). Шток цилиндра А должен втянуться и его конец попадёт в зону действия датчика положения а1. Реализуется операция А–. (Эти условия надо внести в четвёртую строку таблицы состояний).
Операция «Стоп».
Для того чтобы прервать работу гидропривода (при любом положении штоков цилиндров) необходимо нажать на кнопку «Стоп», от которой в контроллер пойдёт сигнал «1» (Кс =1). При этом управляющие сигналы на всех усилителях должны принять нулевое значение (УС1=0, УС2=0). Штоки цилиндров А и В вернутся в исходное положение (втянутся) и гидропривод остановится. Реализуется операция «Стоп». (Эти условия надо внести в пятую строку таблицы состояний).
На основании таблицы состояний входных и выходных устройств составляется принципиальная схема системы управления приводом (рис. 9.5).
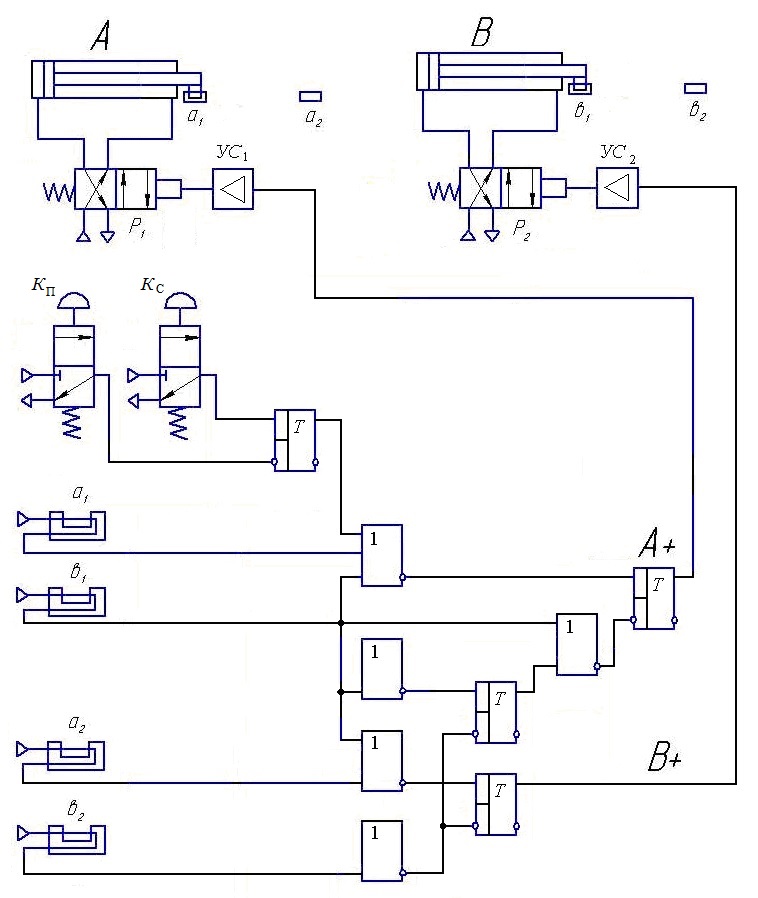
Рис. 9.5 Принципиальная схема системы управления циклом А+; В+; В–; А–.
Пневмогидравлическая система управления технологическим оборудованием